[気鋭のロボット研究者vol.12]鍵は力覚センサー! ロボットでドアを開閉【後編】/静岡大学 小林祐一准教授
産業用ロボットをさまざまな場面で使うには、単にプログラミングされた動作を正確にこなすことだけではなく、環境の変化に柔軟に対応する適応性も求められる。小林祐一准教授は、センシング技術や制御技術を生かしてロボットの適応性を高める研究に取り組む。後編では、力覚センサーから得られる測定データを基に、ドアの形状や構造をロボットに推定させ、最適な開閉の動作をさせる研究を紹介する。
災害現場などでの応用を想定

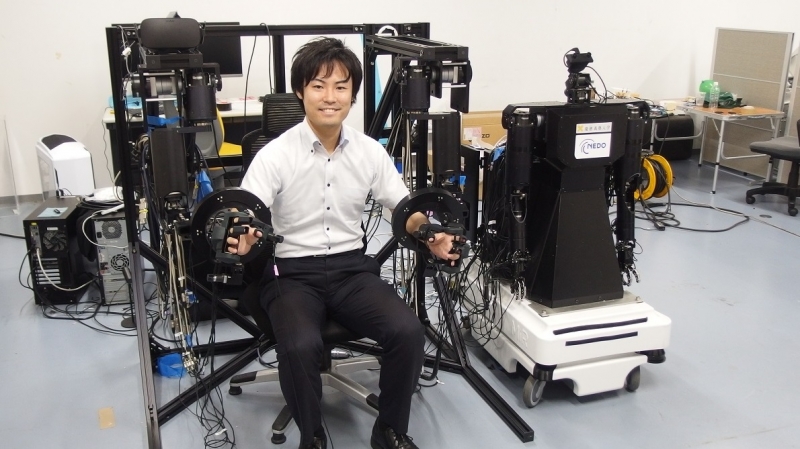
ビジョンセンサーを使った画像処理技術や力覚センサーを駆使した制御技術を生かし、ロボットの適応性を高める研究に注力する小林祐一准教授。研究の最終的な目標は、環境の変化に対してロボットが柔軟に対応できるようにすることだ。
力覚センサーを使ってアーム型のロボットを制御する手法の研究は、静岡大学に赴任した2012年4月から継続的に取り組む。
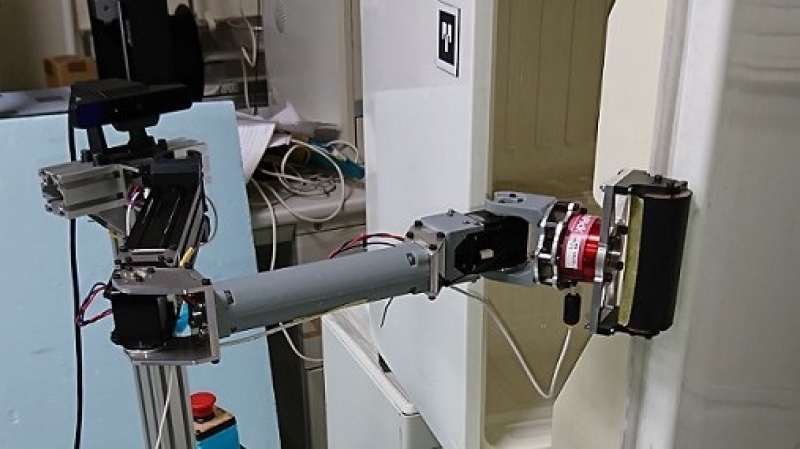
具体的には、移動台車に搭載されたロボットがさまざまな形状や構造のドアやバルブを開閉する研究だ。災害現場などでの応用を想定しているという。
最近は、災害現場で活躍するレスキューロボットが注目を浴びている。人が現場に行けない環境では、ロボットが人の代わりにドアの開閉作業などを担う必要がある。この場合、ロボットは取っ手の位置、押すか引くかなど、さまざまな形状や構造のドアに適応しなければならない。
人なら簡単だが、ロボットだと…
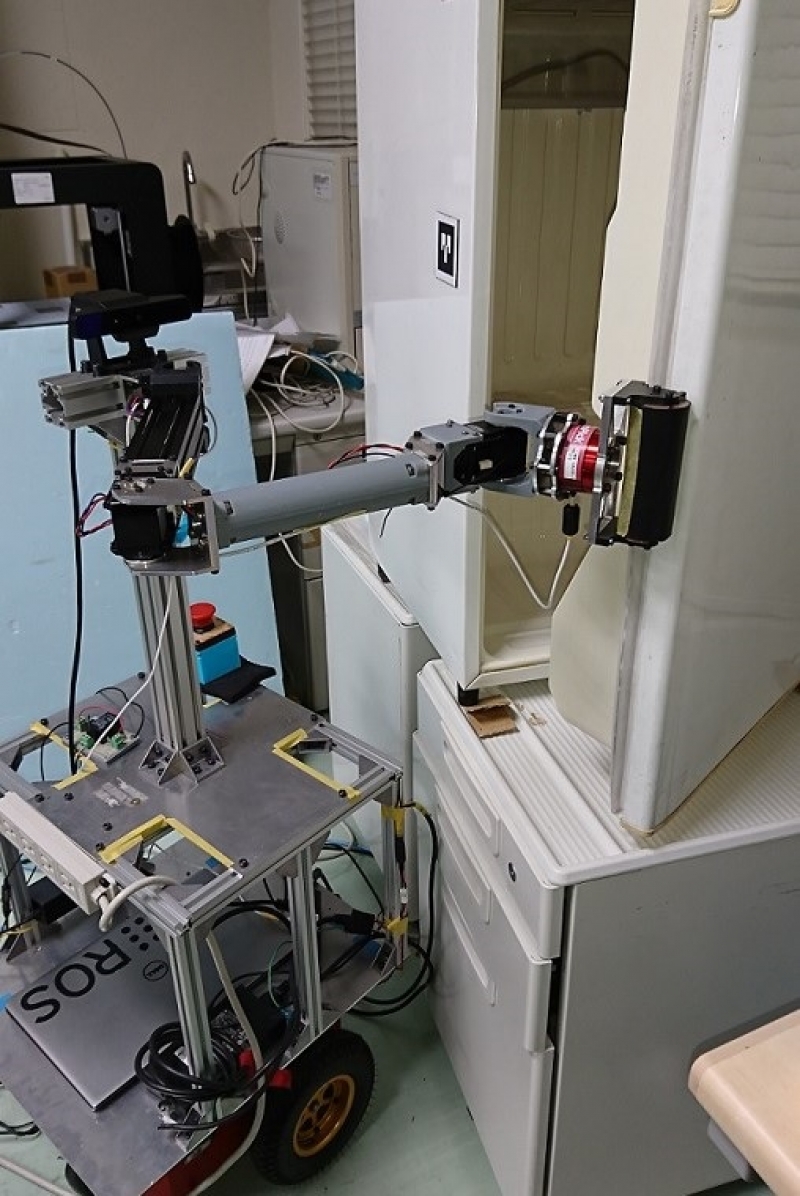
そこで鍵になるのが力覚センサーだ。小林准教授はロボットにドアの形状や構造を認識させるのに力覚センサーを使った。「人は物を触ったり動かしたりして多くの情報を得る。それと同じ機能をロボットにも持たせたかった」と説明する。ロボットにドアノブを実際に触らせ、その時の力のかかり具合を力覚センサーで測定する。その測定データを基に、ロボットにドアの形状や構造を推定させ、最適な開閉の動作をさせる。ドアだけではなく、バルブなども同じ要領で開閉する。だが「人なら簡単にできる動作だが、ロボットだと思うようにはいかない。強い力がかかるとセンサーが壊れるし、逆に力が弱すぎるとセンサーが感知しない」と難しさを語る。今後は、力覚センサーだけではなく近接センサーなどのさまざまなセンサーを使うことも視野に入れる。「いろいろなセンサーを駆使し、ロボットの適応性を高めたい」と意気込む。――終わり(ロボットダイジェスト編集部桑崎厚史)小林祐一(こばやし・ゆういち)静岡大学工学部機械工学科創造科学技術大学院情報科学専攻准教授1997年3月東京大学工学部卒業。99年3月同大学大学院工学系研究科精密機械工学専攻修士課程、2002年3月博士課程修了。同年4月理化学研究所入所。07年2月東京農工大学大学院共生科学技術研究院特任准教授。12年4月静岡大学工学部機械工学科准教授。16年8月から約1年間、ドイツのミュンヘン工科大学客員研究員として勤務。20年2月には著書「ロボットはもっと賢くなれるか哲学・身体性・システム論から学ぶ柔軟なロボット知能の設計」(森北出版)を出版。京都府出身の45歳。※この記事の再編集版は、設備財や工場自動化(ファクトリーオートメーション=FA)の専門誌「月刊生産財マーケティング」2020年5月号でもお読みいただけます。


この記事を読んだ方へのオススメ記事






産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年8月号の特集は「飛躍する中堅・中小~100億に向け攻める経営~」です。電子版も販売しております。詳しくは当欄の下部から。
