[気鋭のロボット研究者vol.18]「遊び」が引き出す制御のゆとり【前編】/中央大学 大隅久教授
大隅久教授の研究対象は幅広い。複数の産業用ロボットの協調作業やパラレルリンク機構を使った懸垂型ロボットの姿勢制御から、建設機械で土砂をすくう研究、クレーン作業でつり下げた物の安定性まで扱ってきた。一見すると関連性がないが、根底には共通したテーマがある。
ロボットの能力を引き出す可能性が広がる
大隅久教授の研究の共通点が、「冗長自由度」だ。さまざまな機構の可動範囲や姿勢の自由度を高めたり、反対に自由度を限定する構造や制御方法を研究する。
例えば、垂直多関節ロボットで物を持ち上げる。物を保持する位置は同じでも、ロボットは複数の姿勢を取れる場合がある。ロボットの各関節の位置やつかんだ物の重さと重心の関係で、ロボットの力の発揮しやすさや物を保持する安定性などの特性が変わる。
「自由度が高く、取り得る姿勢が多いと、それだけロボットの能力を引き出す可能性も広がる」と話す。
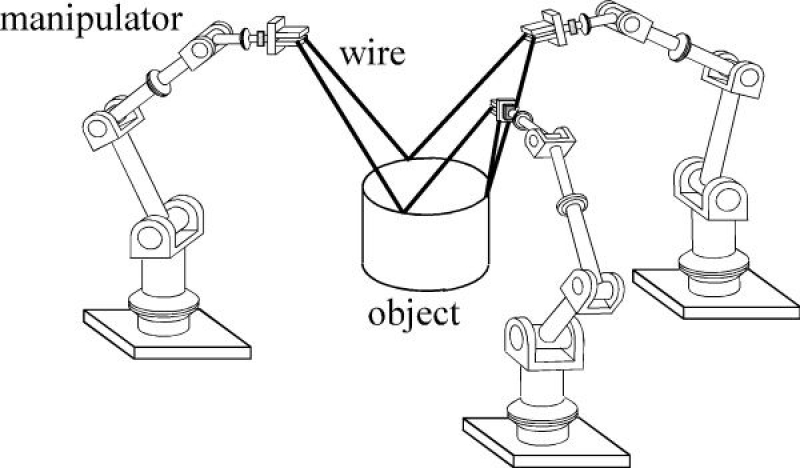
6本のワイヤで対象物をつり下げる
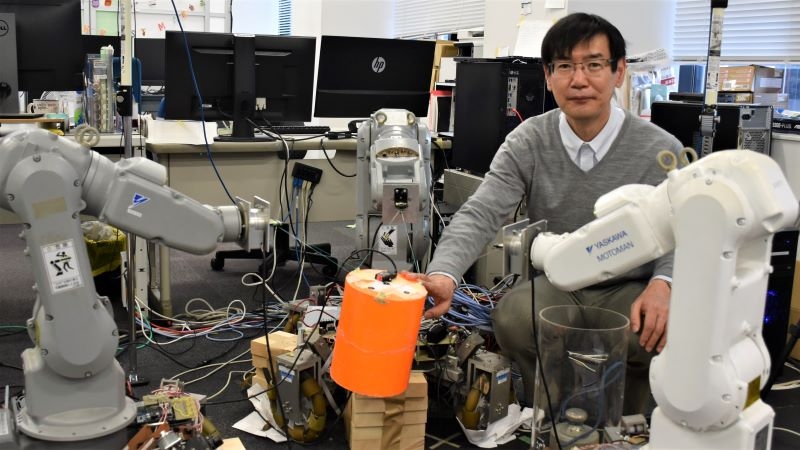
研究の一つが、3台の垂直多関節ロボットを使った協調搬送システムだ。ロボットをそれぞれ自動搬送台車に載せ、一つの物を持ち上げて搬送する。
複数のロボットが協調できると、1台では不可能な大きさや重さの物を持てる。
一方、ロボットは相手の動きに合わせて動作を調整するのが苦手。このシステムでは、協調動作や台車の位置に誤差が生じると、つかんだ物に負荷が集中して、最悪の場合はそれを破損する。
そこで、1台のロボットから2本、合計6本のワイヤで対象物をつり下げて、その位置制御をした。
つり下がるワイヤが「遊び」になり、ロボットの姿勢の自由度や誤差調整などのゆとりが生まれる。それにもかかわらず、対象物自体は揺れない。
「ロボットや周辺機器に一般製品を使って協調動作をできるので、実用化もしやすい」と評価する。
――つづく
(ロボットダイジェスト編集部 西塚将喜)
大隅 久(おおすみ・ひさし)
1985年東京大学工学部卒。87年同大学院修士課程修了、91年工学博士を取得し、同専任講師。93年同助教授。94年中央大学理工学部助教授。2001年から現職。11年日本機械学会ロボティクス・メカトロニクス部門長、13年~14年日本ロボット学会副会長などを歴任。17年~18年、21年日本時計学会会長。東京都出身の59歳。


この記事を読んだ方へのオススメ記事









産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
