[気鋭のロボット研究者vol.6]どこにどう置くのが正解か?【後編】/岐阜大学山本秀彦教授
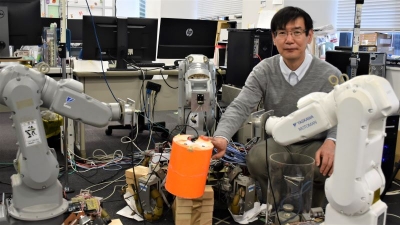
生産技術や生産システムを人工知能(AI)やモノのインターネット(IoT)で知能化し、最適な設備の配置やロボットの動作などをコンピューター上で再現する山本秀彦教授。シミョレーションで割り出されたデータを基に、設備や部品の保管場所を変更して効率化を実現した企業もある。
最終的にはつながるシステムを
新製品の企画立案から、工作機械での部品加工、その先の組み立てまでの一連の工程を全て最適化できるAIシステムが理想だ。しかし、まだそのレベルのものを作ることは難しい。
そこで山本教授は、工程ごとにシステムを開発。「最終的には全てがつながるようにしたい」と言う。
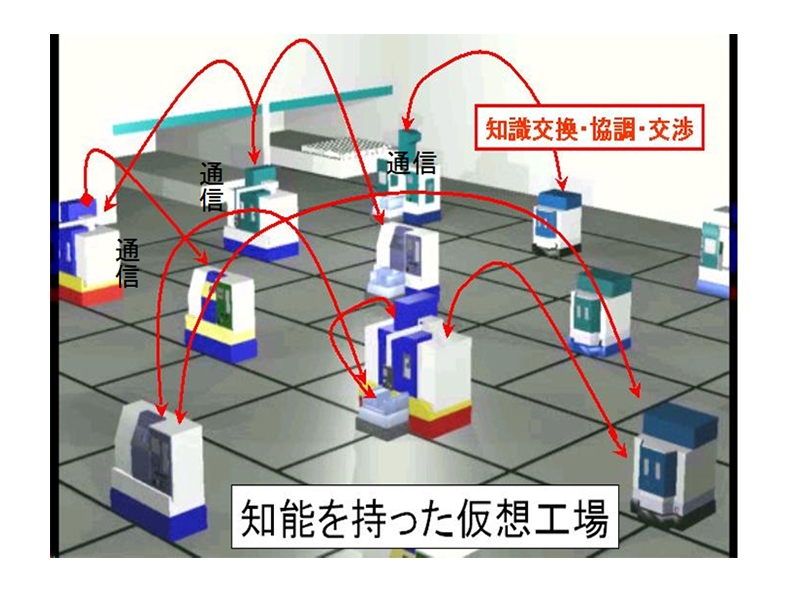
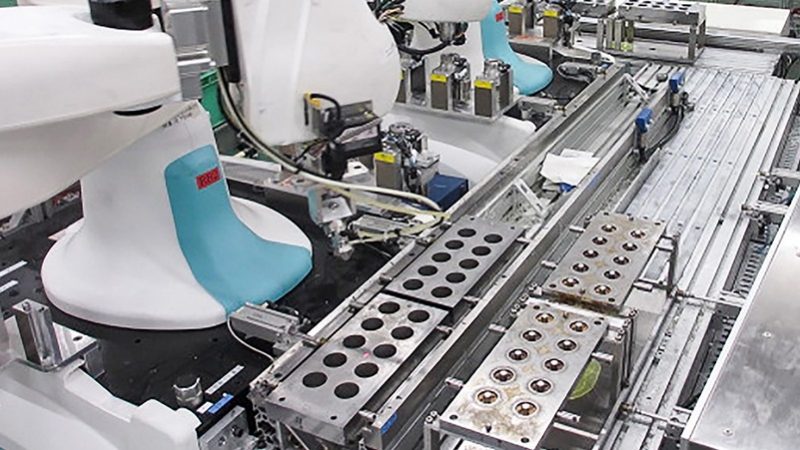
ロボットに作業させる時の動きや自動搬送車(AGV)の最適なルートを自動で算出。また、設備の設置場所や部品の保管場所をシミュレーションで最適化する。そのデータを基に実際に導入し、成果を上げた企業もあるという。
作業者が最適に動けるために
例えば、組み立てラインのレイアウトだ。カミソリなどの刃物を販売する貝印(東京都千代田、遠藤宏治社長)は、カミソリの組み立てライン一つにつき、1人の作業者を充てていた。それを2人で3ラインにしたいと山本教授に依頼があった。
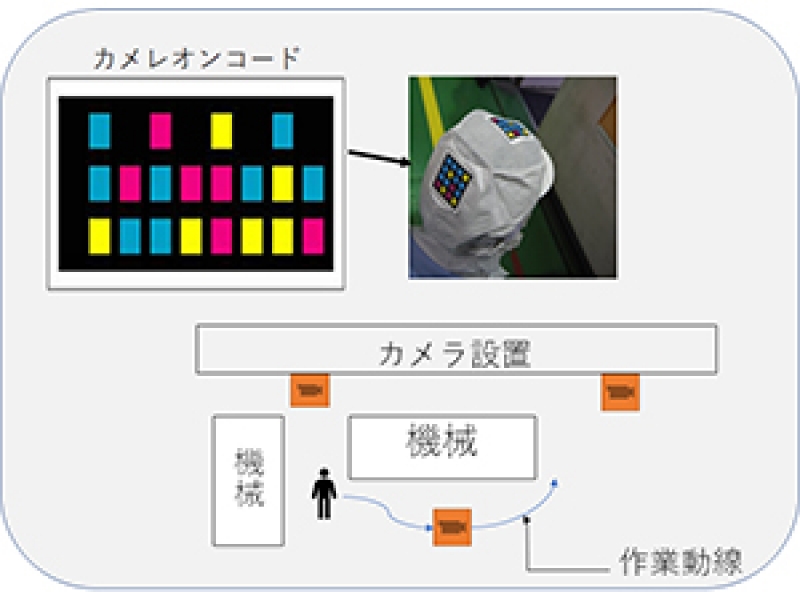
そこで作業者の頭部に「カメレオンコード」(色の組み合わせで情報を表現するカラーバーコードの一種)を付けてカメラで撮影し、1日の行動をデータ化。作業者の動きに無駄がないレイアウトを算出した。すると3つのラインを並列にした場合と比べ、一日8時間の作業時間の中で歩行時間を1時間以上短縮できた。
また建設機械メーカーの部品を組み立てる工場では、部品をどこの棚に配置すべきかを検証。部品を取りに行く順番や棚の位置、座標をシステムに入力して、歩行距離が短くかつ作業しやすいレイアウトを導き出した。工場で実証すると、作業者の歩行距離は従来の20%ほど短くなったという。今後はシステム同士を組み合わせることで「工場が状況に応じて学習し、設備やロボットに指示を出せるようにしたい」と山本教授は意気込む。――終わり(ロボットダイジェスト編集部渡部隆寛)山本秀彦(やまもと・ひでひこ)岐阜大学工学部教授1972年名古屋工業大学大学院修士課程修了、豊田自動織機入社。91年名古屋工業大学大学院博士課程修了、92年豊田自動織機退社。和歌山大学助教授などを経て2004年から現職。現在、生産技術分野の知能化を中心に設計から生産ライン稼働に至るシステム開発を続ける。近未来のものづくり生産の実現に向けて企業との共同開発に取り組む。愛知県出身の63歳。※この記事は「月刊生産財マーケティング」2019年5月号に掲載した連載「今に花咲き実を結ぶ」を再編集したものです


この記事を読んだ方へのオススメ記事






産業用ロボットに関する基礎知識 BASIC KNOWLEDGE


ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年5月号の特集は「AIブームが広げる市場~成長領域のニーズに応えよ~」です。電子版も販売しております。詳しくは当欄の下部から。
