チャックの爪の交換はロボットに【後編】/松本機械工業
30年近く前から取り組む
同社が爪交換の自動化に取り組み始めたのは、何と30年近くも前から。
当時は大手企業を中心に、フレキシブル・マニュファクチャリング・システム(FMS、多品種少量のワークの生産に対応できる柔軟なシステム)の導入が相次いだ。FMSを実現するための技術の一つとして、同社はまずAJCチャックを開発した。
桑本営業本部長は「当時からAJCチャックを使った爪交換の自動化を提案してきたが、一部の大手企業にしか導入されなかった」と語る。
引き合いが急に増えた

しかし、AJCチャックの引き合いはここ2~3年で急に増え、国内外で注目度が一気に高まっている。
工作機械メーカーをはじめ、自動車部品や金型、建設機械など幅広い産業の顧客が最近、爪交換を自動化するために同社に声を掛けている。実際、一部の工作機械メーカーの製造現場にはAJCチャックが導入されたという。ROBO-QJCも同様に、ここ最近で引き合いが増えている。

桑本営業本部長は、ここ最近で引き合いが急に増えた要因を①変種変量生産のニーズ拡大②深刻な人手不足――と分析する。
消費者ニーズの多様化などを背景に、現在は幅広い産業で生産体系が従来の大量生産から変種変量生産に移行しつつある。
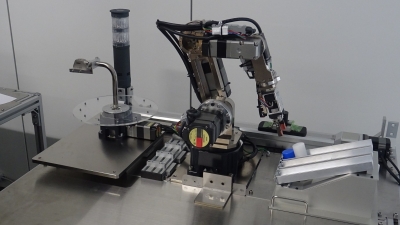
旋盤の加工では通常、ワークが変わればチャックの爪も交換する必要がある。前述の通り、爪の交換は従来、作業工具を使って人が手作業でやっていた。そのため、変種変量生産が主流になれば、爪交換が頻繁に発生し段取り替え(セッティングの変更)に多くの手間がかかる。
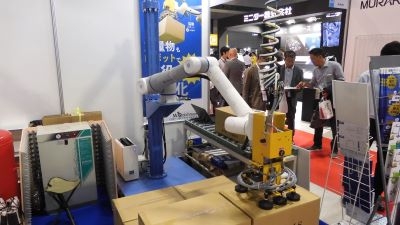
また、最近は人手不足が深刻で、製造現場ではそもそも爪を交換するための人手が足りていないことも多い。爪交換の作業は大きな手間になるため、ロボットなどを使って自動化したいと考えるのも自然な流れだろう。
QJCチャックやAJCチャックは人が爪交換をする場合でも手間を大幅に軽減できるが、ロボットでも作業がしやすく自動化に向く。こうした強みが顧客から評価され、これら2つの製品が国内外で大きな注目を集めている。


この記事を読んだ方へのオススメ記事









産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
