[気鋭のロボット研究者 vol.22]バリ取りに力制御を【前編】/岐阜大学 伊藤和晃准教授
岐阜大学の伊藤和晃准教授は、ロボットや位置決め装置などの動きを制御する「モーションコントロール」の研究に取り組む。「熟練作業者の匠の技をロボットで再現したい」と意気込む。その一環で、これまで人手作業に依存していたバリ取りの自動化を目指し、力制御の技術を生かしたバリ取りロボットシステムを開発した。
ロボットとエンドエフェクターでそれぞれ制御
熟練作業者の技能をロボットで再現する研究に注力する伊藤准教授。最初に取り組んだテーマは、力制御の技術を駆使したバリ取りロボットシステムの開発だ。バリとは加工した部品の縁などにできる小さな突起物のことで、これまでは人手で取り除くことが多かった。
伊藤准教授はある企業の相談をきっかけに、2016年ごろから研究に着手した。
バリ取りにロボットを使う場合、アームの先端部を真っすぐ動かしたり、円弧を描いたりする軌跡精度の高さが求められる。しかし、自重によるアームのたわみや、各関節内での摩擦(非線形摩擦)や機構振動などの問題で、ロボットを真っすぐ正確に動かすのは難しいという。

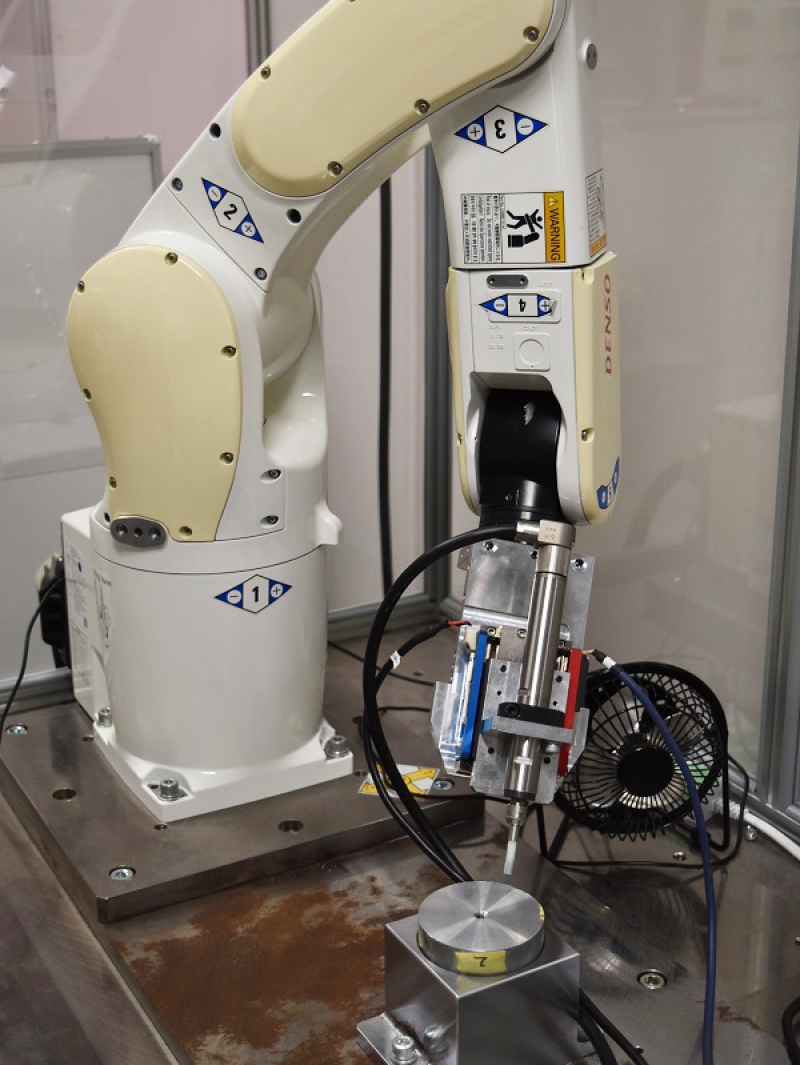
そこで、伊藤准教授は大まかな動きをロボット側で、細かな動作をアーム先端に取り付けるエンドエフェクター側でそれぞれ制御させる手法を考案。バリ取り工具を動かすリニアモーターや、位置検出用の光学スケールなどで構成された独自のエンドエフェクターも開発した。
バリ取り工具の押し付け力をエンドエフェクターが検知して最適な力になるよう制御する仕組みで、ロボットの軌跡制御に依存することなくワーク(被加工物)の形状にならってバリを除去できる。
「リニアモーターに流す電流指令値と、光学スケールの測定値で力の大きさを推定する。力覚センサーに比べ電磁ノイズの影響が少なく、応答性の高い力検出ができる」と説明する。
この研究で培った力制御の技術を応用し、今後は熟練作業者の穴開け作業をロボットで再現する考えだ。
――後編に続く
(ロボットダイジェスト編集部 桑崎厚史)
伊藤和晃(いとう・かずあき)
2003年3月名古屋工業大学大学院工学研究科博士後期課程修了、4月豊田工業高等専門学校電気・電子システム工学科助手。04年4月講師、09年4月准教授、17年4月岐阜大学工学部機械工学科知能機械コース准教授。現在に至る。人工知能研究推進センターのロボティクス分野長や航空宇宙生産技術開発センターの人材育成部門長も兼任する。1975年生まれの46歳。三重県出身。
※この記事の再編集版は、設備財や工場自動化(ファクトリーオートメーション=FA)の専門誌「月刊生産財マーケティング」2021年12月号にも掲載されています。


この記事を読んだ方へのオススメ記事







産業用ロボットに関する基礎知識 BASIC KNOWLEDGE

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
