[気鋭のロボット研究者vol.19]独自の制御方法を応用【後編】/豊橋技術科学大学 佐藤海二教授
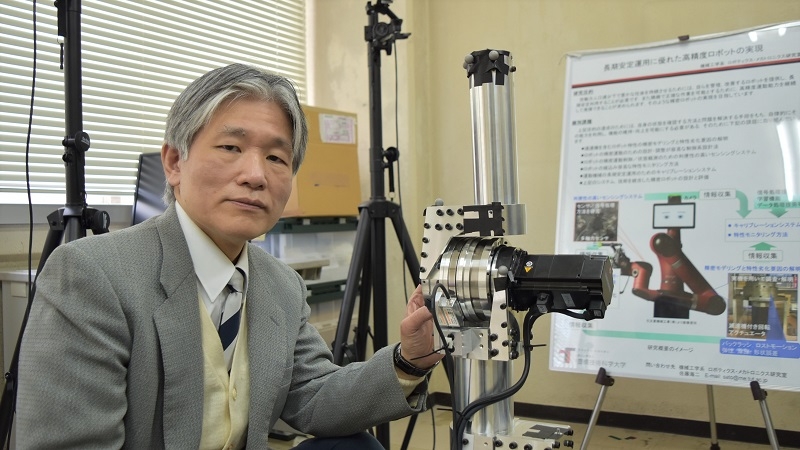
豊橋技術科学大学の佐藤海二教授は「誰でも簡単に使い続けられるロボットの開発」をテーマに、ロボットの研究に取り組む。それに当たり、ロボットを複数台自作し、その制御には「NCTF制御」を応用する。NCTF制御とは佐藤教授が20年以上前に考案した独自の制御方法で、専門知識がなくても高性能な制御系を設計できるのが特徴だ。
「誰でも簡単に使える技術を」との思い

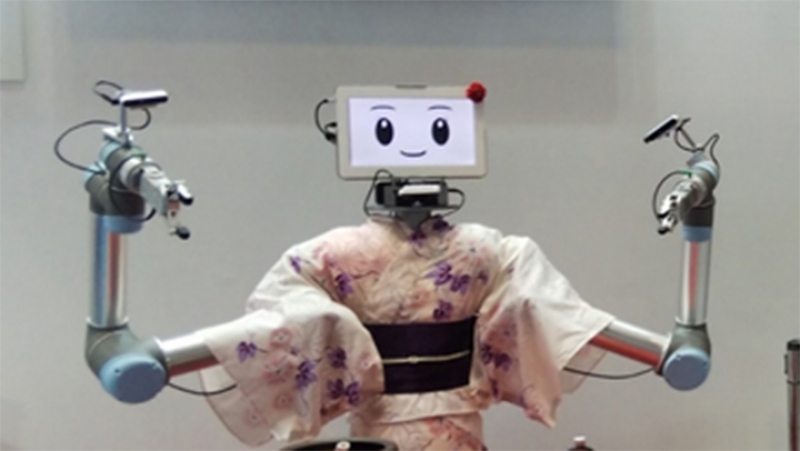
使いやすさと保守性を両立したロボットの実用化を目指し、2014年ごろから研究を本格的に開始した佐藤教授。現在は、自作ロボットに搭載した内部センサーだけで、振動や機構的な問題などをどこまで検知できるのかを調査している最中だ。
その自作ロボットを制御するのに、20年以上前に考案した独自の制御方法「NCTF制御」を応用する。
NCTF制御は「直線運動機構や回転機構が目的の動作をする上で問題になる、摩擦や振動などの厄介な特性を考慮した上で、その特性の変動を抑え込む制御系」を簡単に設計できるのが特徴だ。さらに、ユーザーニーズに合わせてさまざまなオプション機能を追加設計できるよう、機能拡張も進める。例えば、直線運動機構や回転機構を使って位置決めをする時に振動が問題になる場合は、その振動を抑制できる機能を簡単に組み込める。
「高速で高精度な制御系を設計するには通常、制御理論に関する知識を備えた技術者が必要だ。しかし、こうした専門知識がない人でも簡単に制御系を設計できるように、NCTF制御を考案した」と佐藤教授は語る。ロボットもNCTF制御も、研究の根底にあるのは「誰でも簡単に使える技術を開発したい」との思いだ。
ロボットの研究はまだ始まったばかりで、佐藤教授は「実用化が100だとしたら、現状の進捗(ちょく)は10%ほど」と自己評価する。技術者不足に頭を抱える中小企業などにロボットを提案できる日を目指し、今後も研究を続ける。
――終わり
(ロボットダイジェスト編集部 桑崎厚史)
佐藤海二(さとう・かいじ)
1989年3月東京工業大学大学院総合理工学研究科精密機械システム専攻修了。2007年4月同大学大学院総合理工学研究科准教授、16年4月同大学科学技術創成研究院准教授。17年4月から現職。13年2月から精密工学会の超精密位置決め専門委員会委員長も務める。1964年生まれの57歳。神奈川県出身。

この記事を読んだ方へのオススメ記事








産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年5月号の特集は「AIブームが広げる市場~成長領域のニーズに応えよ~」です。電子版も販売しております。詳しくは当欄の下部から。
