[ロボへの道も一歩からCase.1-⑥]ハンドの爪、削ってます/サンエース編
「ロボへの道も一歩から」では、産業用ロボットを初めて導入しようとする会社を記者が訪問、その課程で起きた出来事や苦労などを紹介する。何度も足を運び、ロボットの導入までを追いかける。まだ進行中の計画を取材するため、何が起こるのか誰にも分からない。第6話は、購入したロボットハンドの爪部分を、用途に適した形状に削る話。
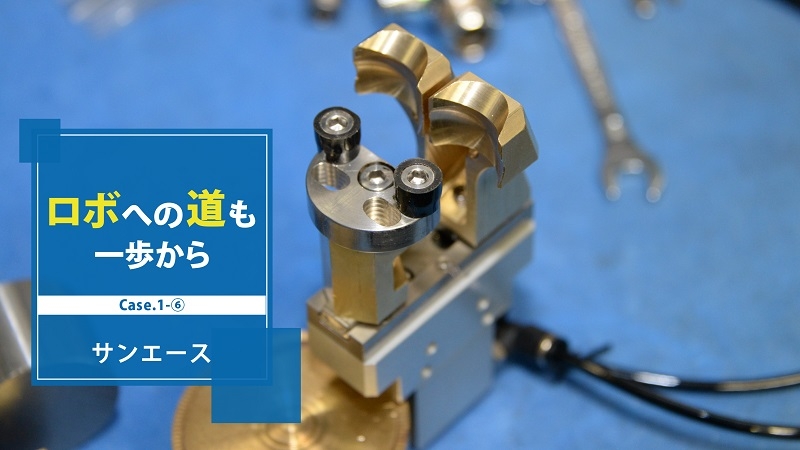
2種類の持ち方に適したハンド形状
【前回までのあらすじ】
サンエース(岐阜県各務原市、藤田斉社長)は、配管に使われる製品「エルボ」の水漏れ検査を自動化するためロボットを導入することに。システムインテグレーター(SIer、エスアイアー)に頼らずに進めるため、全て自分たちで考えなければいけない。最も頭を悩ませたのは、エルボの入ったストッカーをどのように置くかだった。リフター(昇降機)を購入し、その上に積み上げることで、常に同じ高さでロボットがエルボを取り出せるようにした。

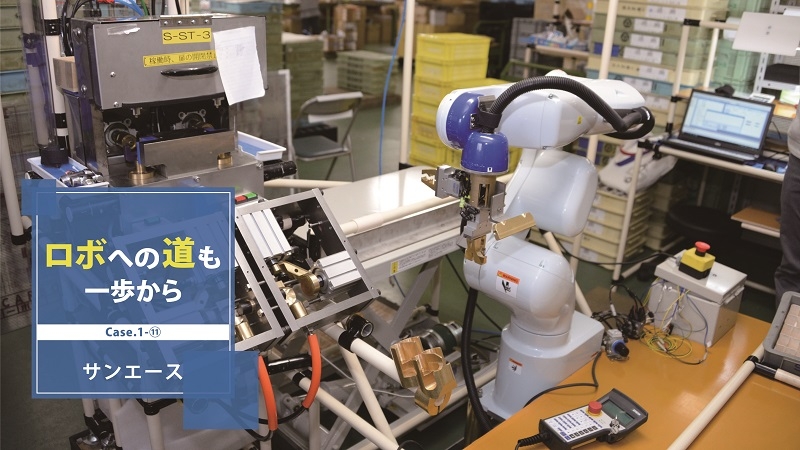
水漏れを検査する機械の両脇にストッカーを設置。ロボットは、エルボを未検査品の入ったストッカーから取り出して、検査機にセット。終わったら機械から外して、検査済み用ストッカーへしまう。
ロボットを使った一連の作業の流れが見えてきた。
「ロボットハンドも、購入してようやく届いたんですよ」(藤田社長)
これまでは生産技術者の斉藤さんがハンドの爪を模した物を自作し、どうつかむかを検証していた(Case.1-③参照、その記事はこちらから)。ロボットハンドが届いたことで、より実際の動きに近い形での検証ができるようになった。
「どこのハンドを採用したんですか?」(記者)
「近藤製作所(愛知県蒲郡市、近藤茂充社長)のリニアガイドハンド『LHAシリーズ』を2つ買いました」(斉藤さん)
「2つ? 予備ですか?」(記者)
「いえ、ストッカーから出す時と、検査機にセットする時で、それぞれつかみ方が変わるので、2種類要るんです」(斉藤さん)
ストッカーから取り出す時の持ち方では、検査機に入れる時に装置とロボットが接触してしまう。そこで、セットする前にエルボを持ち直す必要があるらしい。
「それで2つですか」(記者)
「はい、もう(ハンドの爪部分を)削って作ってますよ」(斉藤さん)
「え、もう始めてますか!? 」(藤田社長)
藤田社長も今初めて知ったらしい。
「1種類目はほぼ完成してます!」(斉藤さん)
「へぇ~そうですか(うなずいてはみたが、実はまだ理解できてない私)。
購入したんですよね? 完成ってどういうことですか?」(記者)
「ハンドの本体を買って、爪の部分は斉藤さんが自作してるんですよ」(藤田社長)
爪部分は、エルボとそのつかみ方に合わせて斉藤さんが削り出しで作っているとのこと。
「あー、既製品の爪を使うわけじゃないんですね」(記者)
「実物を見た方がいいかもしれないですね」(藤田社長)
「そうですね」(記者)
さっそく斉藤さんの作業場で見せてもらうことに。
同じ企業の記事
>>[ロボへの道も一歩からCase.1-⑫(最終回)]ロボットのある日常へ/サンエース編
>>[ロボへの道も一歩からCase.1-⑪]ロボが動く時…/サンエース編
>>[ロボへの道も一歩からCase.1-⑩]まずは一通りできるように!/サンエース編
>>[ロボへの道も一歩からCase.1-⑨]作業の選択と集中/サンエース編
>>[ロボへの道も一歩からCase.1-⑧]立ちはだかる干渉の壁/サンエース編
>>[ロボへの道も一歩からCase.1-⑦]ロボ、ついに降臨!/サンエース編
>>[ロボへの道も一歩からCase.1-⑤]どう置くんだ、ストッカー!?/サンエース編
>>[ロボへの道も一歩からCase.1-④]ロボ決まる/サンエース編
>>[ロボへの道も一歩からCase.1-③]SIer不在で進行中/サンエース編
>>[ロボへの道も一歩からCase.1-②]ベテラン斉藤さん現わる!/サンエース編
>>[新連載・ロボへの道も一歩からCase.1-①]やっぱりコロナはキツかった/サンエース編


この記事を読んだ方へのオススメ記事








産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
