[気鋭のロボット研究者vol.13]負圧を利用したシンプルなグリッパー【前編】/関西大学 高橋智一准教授

関西大学の高橋智一准教授は、ものを吸い付ける負圧に注目し、汎用性の高いグリッパーを研究する。2つのグリッパーの研究に取り組み、前編ではタコの吸盤にヒントを得たグリッパーを紹介する。固いものも軟らかいものも、平面でも曲面でもつかめ、固いものなら最大5kg程度までハンドリングできる。
タコをまねてシンプルに
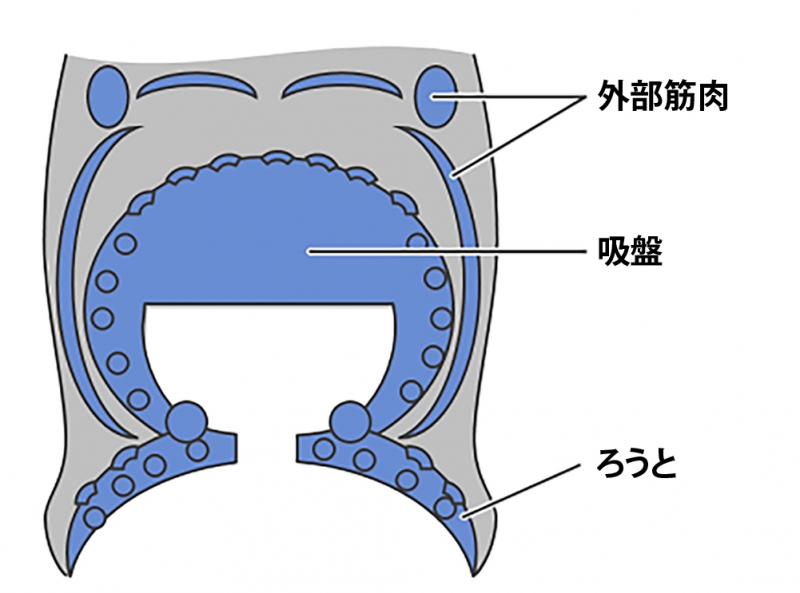
タコの吸盤は、外からも見えるろうと部と、奥に広がる吸盤部からなる。ろうと部をつかむ対象に密着させた後に、吸盤部の空間を広げて負の圧力を作り出して強い吸着力を生む。
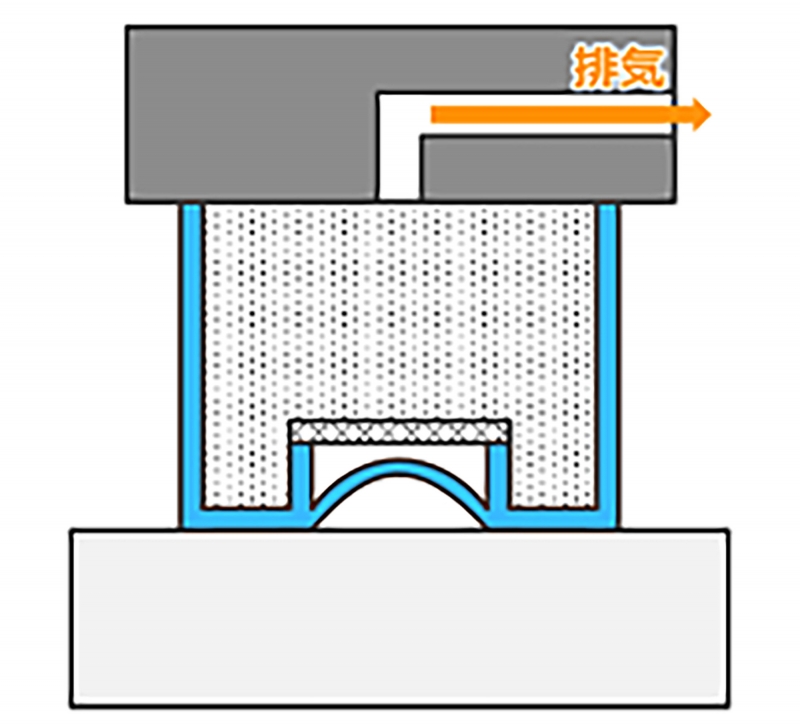
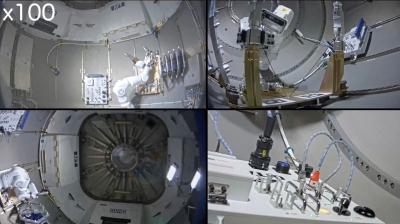
高橋准教授が研究する真空吸着グリッパーは、まさにこのタコの吸盤を模した構造だ。筒状のグリッパー本体底面を薄膜にし、底面を対象物に密着させた状態で、真空ポンプで内部を減圧すると、薄膜部分がグリッパーの内部に引き込まれる。すると対象物と薄膜の隙間に強い負圧が発生し、吸い付ける原理だ。
高橋准教授は「この真空吸着グリッパーは、固いものも軟らかいものも、平面でも曲面でも幅広くつかめるのが強み」と話す。真空ポンプにつながる排気ホース以外に配線がなく取り回しやすい点、シンプルな構造で製作コストを抑えられ、メンテナンスが簡単な点も長所だ。固いものなら最大5kg、軟らかいものは最大1kg程度までつかめる。
実用レベルの性能を目指す
今後の課題は、正確に吸着して把持するまでのスピードを上げることや、実用レベルの耐久性や用途に適した材質を選ぶこと。「企業と協力して実用性を高めたい」と高橋准教授。
真空吸着グリッパーの研究を始めたのは2013年で、それ以前は、負圧を利用した別のグリッパーを研究していた。以前研究していたグリッパーにも18年に医療関係者から関心が寄せられ、再び研究を始めた。後編でそのグリッパーを紹介する。
――後編に続く
(ロボットダイジェスト編集部 松川裕希)
高橋智一(たかはし・ともかず)2010年3月東北大学大学院工学研究科ナノメカニクス専攻博士課程後期修了、4月関西大学システム理工学部機械工学科助教。15年准教授。16年第5回ネイチャー・インダストリー・アワード技術開発委員会賞受賞。20年精密工学会論文賞受賞。1982年生まれの37歳。兵庫県出身。


この記事を読んだ方へのオススメ記事




産業用ロボットに関する基礎知識 BASIC KNOWLEDGE


ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
