![[ショールーム探訪vol.38]理解を深めてもらう場所に/Mujin「愛知ロボットイノベー……](/upload/1751256584-250957_1.webp)


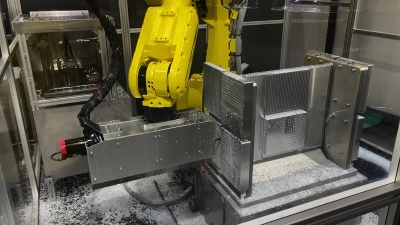
![[SIerを訪ねてvol.55]中子のバリ取りや搬送に特化/松下工業](/upload/1743642124-411869_1.jpg)
![[注目製品PickUp! vol.79]静電チャック技術を応用し、多様な立体形状もつかめる……](/upload/1740644042-522725_1.jpg)
![[SIerを訪ねてvol.52]地域特有の課題に焦点を当てる/ヤナギハラメカックス](/upload/1739325023-460982_1.jpg)






月刊生産財マーケティング
MAGAZINE
ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。