[ロボットが活躍する現場vol.41]効果的な自動化システムの構築法とは/象印チェンブロック

象印チェンブロック(大阪府大阪狭山市、津田晴将社長)は、工作機械へのワーク(加工対象物)のローディングとアンローディングを産業用ロボットで自動化する。扱うワークに合わせてエンドエフェクターやワークストッカーを内製するなど、ロボットがより活躍できる環境作りにも余念がない。自動化システムの導入に関して、苦労や工夫した点などを尋ねたら、今後自動化システムの導入を検討する読者の役に立つ話を聞くことができた。
ロボットをより使いやすく
象印チェンブロックは、チェーンブロックやクレーンを開発、製造する。チェーンブロックとは、チェーンと滑車で構成された機器で、工場や物流拠点などの天井に設置し、重量物をつり上げるために使われる。
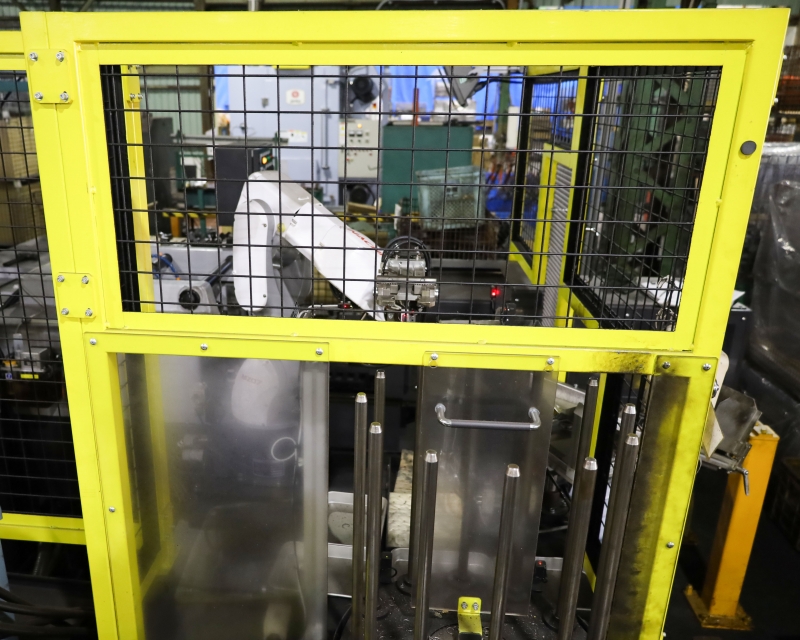
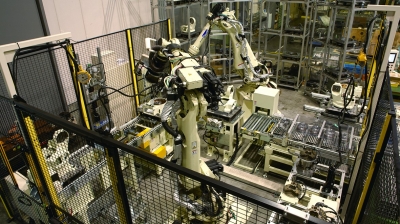
同社はチェーンブロックやクレーンの部品製造から組み立てまでの工程を一気通貫で進められることを強みとする。部品加工時に、工作機械へワークをローディング、アンローディングする作業にロボットを使い、自動化した。現在では不二越のロボットを6台運用している。「メーカーをバラバラにしたら使い勝手が悪くなるため、1社に統一した」と製造部の山口大輔課長は言う。
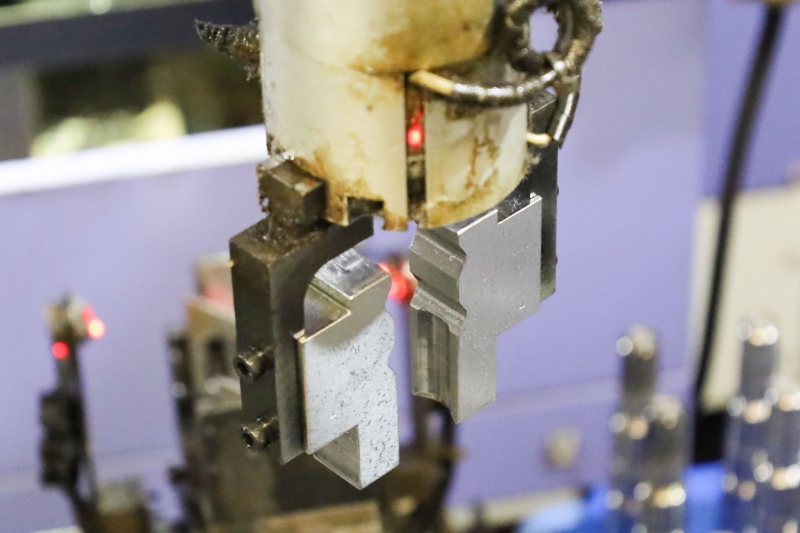
扱うワークの形状は円筒形がほとんどだ。平面の部分がなく真空吸着タイプのグリッパーが使えないため、ハンドの爪でつかむ必要がある。ただ扱うワークのサイズはさまざまで、それに対応したグリッパーをその都度購入するとコストがかさんでしまう。
それに対する解決策として、ハンドを内製する。また、ロボットがワークを工作機械へローディングしやすくするよう、ワークストッカーやワークの持ち替えをするための仮置き台も内製する。
「当社は工作機械を使った金属加工が得意。自分たちでものづくりができるからこそ、それを生かしてワークにフィットしたハンドやストッカーなどを作れる」と山口課長は強調する。
作業の流れとしては、まずワークストッカーに縦方向に挿している円筒形の細長いワークをつかむ。
ワークを縦向きで持ったままでは機械にセットしにくいため、ワークを一度仮置き台に置き、横向きに持ち替えて機械にローディングする。
「仮置きなどの作業を挟まず最短距離で作業する方が1回の作業効率は高いものの、ロボットのギアなどに負担がかかる体勢を強いてしまう。多少遠回りをしても、トラブルなく動き続ける方が、当社にとり価値が高い」と山口課長は言う。
仮置き台のワークを受け止める箇所はV字になっており、多少アームの位置がずれても所定の位置にワークが収まる。ハンドも縦向きと横向きどちらでも持てるよう爪の内側に縦方向と横方向の溝を設けるなど工夫を凝らす。


この記事を読んだ方へのオススメ記事










産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
