[気鋭のロボット研究者vol.12]あいまいな自然言語を協働ロボに【前編】/静岡大学 小林祐一准教授
最近は深刻な人手不足を背景に、産業用ロボットの活躍の場が急速に広がっている。だが、ロボットをさまざまな場面で使うには、単にプログラミングされた動作を正確にこなすことだけではなく、環境の変化に柔軟に対応できるような適応性も求められる。小林祐一准教授は、センシング技術や制御技術などを生かしてロボットの適応性を高める研究に注力する。前編では、あいまいな自然言語を協働ロボットに認識させる研究を取り上げる。
ロボットの適応性を高める
小林祐一准教授は、ビジョンセンサーを使った画像処理技術や力覚センサーを駆使したロボットの制御技術などの研究に取り組む。研究の最終的な目標は、ロボットの適応性を高め、環境の変化に対してロボットが柔軟に対応できるようにすることだ。
2016年4月から、協働ロボット関連の研究も始めた。小林准教授は「人と協働ロボットが同じ空間で作業をするうえで重要なのは、作業内容に関するコミュニケーションを取ること」と考えた。現在は、自然言語と呼ばれる、人が日常会話で使用する言語を協働ロボットに認識させる研究に力を注ぐ。
「自然言語なので、あいまいな場合もあれば具体的な場合もある。そのため、協働ロボットはあいまいさを含んだ自然言語から、自身の作業の状況を認識する必要がある」と説明する。
飲食店やコンビニエンスストア、工場などでベテランの従業員が新人に作業内容を口頭で教えている風景を想像すると分かりやすい。ベテランは自然言語を使って新人を指導するが、新人はあいまいな自然言語から自身が担当する作業内容を理解し、成長していく。そのプロセスの一部を協働ロボットに当てはめるようなイメージだ。
文章のデータベースを作る
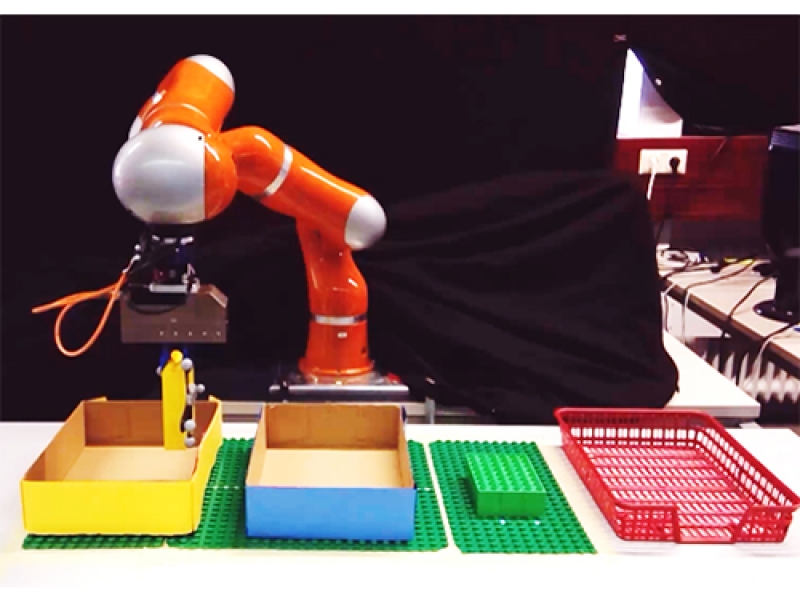
小林准教授は、箱に入った物体を別の箱に移す作業を協働ロボットにさせた。正しい動作だけではなく、わざと失敗もさせながら、一つ一つの作業の様子をビデオに録画した。
クラウドソーシングのサービス(インターネット上で不特定の人に業務を委託するサービス)を利用し、動画の作業状況を説明した文章を、大勢の人に作成してもらった。そして「ロボットが黄色いものをつかんだ」「緑の箱に落とした」など、あいまいな文章も含めて自然言語のデータベースを構築した。
作業内容に応じたデータベースを作ることで、協働ロボットが作業に失敗したとしても、人の話す自然言語を基に失敗の内容を認識し、最適な軌道修正を図れるという。
研究はまだ道半ばだが「人が介在することが多いロボットシステムや、レイアウトの変更が頻繁に起こるロボットシステムなどに応用できそうだ」と期待する。
――後編につづく
(ロボットダイジェスト編集部 桑崎厚史)
小林祐一(こばやし・ゆういち)
静岡大学 工学部機械工学科 創造科学技術大学院 情報科学専攻 准教授
1997年3月東京大学工学部卒業。99年3月同大学大学院工学系研究科精密機械工学専攻修士課程、2002年3月博士課程修了。同年4月理化学研究所入所。07年2月東京農工大学大学院共生科学技術研究院特任准教授。12年4月静岡大学工学部機械工学科准教授。16年8月から約1年間、ドイツのミュンヘン工科大学客員研究員として勤務。20年2月には著書「ロボットはもっと賢くなれるか 哲学・身体性・システム論から学ぶ柔軟なロボット知能の設計」(森北出版)を出版。京都府出身の45歳。
※この記事の再編集版は、設備財や工場自動化(ファクトリーオートメーション=FA)の専門誌「月刊生産財マーケティング」2020年4月号でもお読みいただけます。


この記事を読んだ方へのオススメ記事









産業用ロボットに関する基礎知識 BASIC KNOWLEDGE


ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
