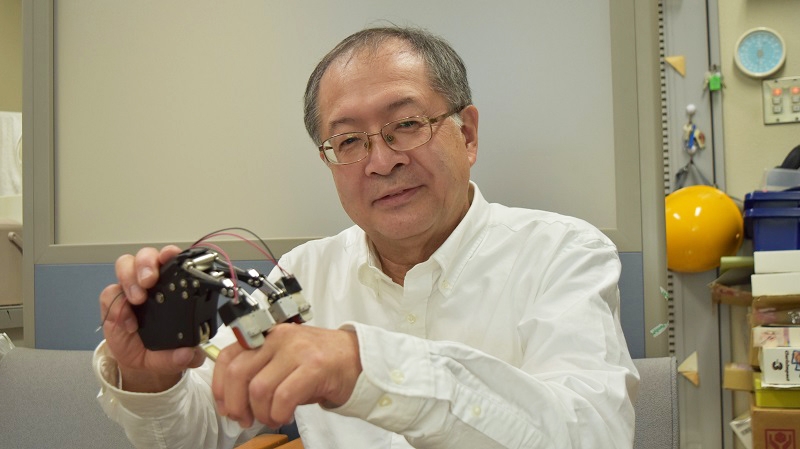
[気鋭のロボット研究者vol.8]CAMでロボットの動作プログラムを【前編】/金沢大学浅川直紀教授
金沢大学の浅川直紀教授は、産業用ロボットを使ってバリ取りや面取り、磨きなどの機械加工を自動化する研究に力を注ぐ。ロボットは通常、ティーチング(ロボットに動作を覚えさせること)を通じて動作プログラムを生成する。しかし、浅川教授は「ティーチングレス主義」を掲げ、「CAM」と呼ばれるソフトウエアを使ってロボットの動作プログラムを作ろうと模索している。
30年近くにわたり研究
浅川直紀教授は30年近くにわたり、産業用ロボットの研究に取り組む。
中でも、バリ取り(加工時に切り口などに生じる小さな突起物であるバリを取り除くこと)や磨きなどの機械加工の自動化が主な研究テーマだ。
ロボットを30年以上研究している“ベテラン”の知見を頼りに、地元北陸の中小企業などを中心とした数多くの企業がロボットの導入についての相談をしに、浅川教授の元を訪ねるという。
「溶接や塗装ではすでに技術研究もメーカー各社による製品化も進んでいるため、こうした事例の相談事は私のところには来ない。バリ取りなど自動化が比較的難しい案件が多い」と話す。
「ティーチングレス主義」掲げる
ロボットは通常、ティーチングを通じて動作プログラムを生成することが多い。だが、ティーチングは難しく時間がかかり、ロボットを扱うには一定の技術が要求される。
そのため、浅川教授は「ティーチングレス主義」を掲げる。ティーチングに頼らず、3次元CADソフトで設計した部品のデータから、「CAM」と呼ばれるソフトを使ってロボットの動作プログラムを作ろうと模索している。
CADとは「コンピューター・エイデッド・デザイン」の頭文字を取った用語で、コンピューター上で設計データを作成するためのソフトを指す。
一方、CAMは「コンピューター・エイデッド・マニュファクチャリング」の頭文字を取った用語で、CADデータを基に加工プログラムを生成するソフトだ。工作機械などを使う金属加工の業界では、CADと併せて一般的に使われている。
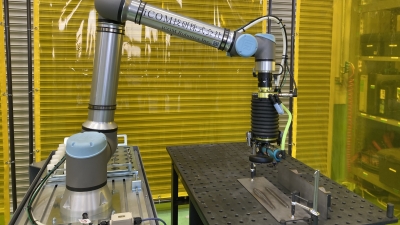
自由度が高い分、新たな問題も
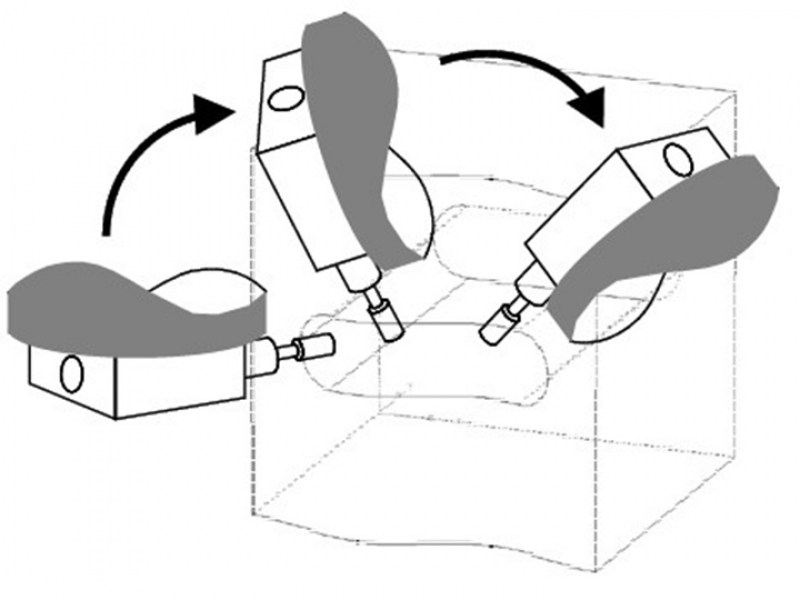
機械加工には通常、工作機械を使う。工作機械は加工する内容に応じてさまざまな種類に分類されるが、制御できる軸数は一般的には3~5軸だ。一方、ロボットで機械加工を自動化する場合は、6軸の垂直多関節ロボットが主に使われる。ロボットハンドの代わりにバリ取り用の工具を取り付けることが多い。ロボットは一般的な工作機械よりも制御できる軸数が増えるため、自由度も高い。しかし、軸数が増える分、ロボットにCAMを適用しようとすると、工作機械にCAMを使う時には考える必要がなかった新しい問題が発生するという。「部品の穴にバリ取り用の工具を入れて、バリを取る工程をロボットで自動化する場合、ティーチングなら人がロボットの近くで作業をするため、技術があれば普通にできる。だが、CAMを使う場合は、加工点の位置や工具の向き、工具を動かす方向を正確に指定しなければならない。ロボットは工作機械よりも自由度が高いので、工具の向きや動かす方向を考えずに工作機械と同じ要領でCAMを使ってしまうと、ロボットの姿勢が大きく変化してあり得ない動きをするようなプログラムが作られる」と浅川教授は語る。では、これを防ぐにはどうしたらいいのか?――後編につづく(ロボットダイジェスト編集部桑崎厚史)浅川直紀(あさかわ・なおき)金沢大学設計製造技術研究所教授1991年4月電気通信大学助手、98年5月同大学講師。同年8月に金沢大学講師に。2002年10月同大学助教授、07年4月准教授、13年10月教授。19年6月から現職。産業用ロボットの研究に携わってもうすぐ30年を迎える。ロボットの魅力を「自由度の高さ。これに尽きる」と熱弁する。趣味はオートバイやスキー。1965年4月生まれの54歳。長野県出身。


この記事を読んだ方へのオススメ記事






産業用ロボットに関する基礎知識 BASIC KNOWLEDGE



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
