[注目製品PickUp! vol.9]設置面積は座布団以下!? 500mm四方に収まるコンパクトなロボット【前編】/スギノマシン「スイングアーム式コラムロボット」
同じスペースなら可搬質量3~4kg

コラムロボットはコンパクトな一方で剛性(変形のしにくさ)は高く、最大可搬質量も15kgと大きい。
青木係長は「コラムロボットと同じスペースで垂直多関節ロボットを使う場合、可搬質量は3~4kgレベルになる」と胸を張る。
非常にコンパクトなのに、なぜ15kgもの可搬質量を確保できたのか?
その答えは、アームを支える独自の機構にある。

コラムロボットは、上下2本のリンク(節)でアームを支えている。上下のリンクは、ボディー上を真っすぐ動く2つの軸と連結している。この2本のリンクでアーム先端の荷重を分散するため、アームの質量に対して高い剛性を持たせることができる。
「パラレルリンクロボットは複数のリンクでロボットの先端を支えるため、アームが非常に軽い割には剛性が高く、素早く動かせる。当社のコラムロボットもアームを支えるのにリンクを使っており、構造的にはパラレルリンクロボットに近い」と青木係長は説明する。
また、一般的な多関節ロボットは可搬質量が大きくなればなるほど、材料の重さに負けずにプログラム通りの安定した動作ができるよう、アームにはより高い剛性が求められる。その結果、手首から土台に近づくにつれ大型のモーターや減速機が必要になり、ロボット全体が大型化する。
一方、コラムロボットの場合、リンクを使った機構でアームの剛性を十分に確保しているため、土台に大型のモーターを使わなくてもロボットを動かせる。これこそが、最大可搬質量15kgのロボットがわずか500mm四方の狭小スペースに設置できる理由だ。
直線軸でアームの位置が決まる
リンクを使用した独自の機構は、アームに対する剛性の高さだけではなく、使いやすさにも生かされる。ティーチングと呼ばれるロボットのプログラムを生成する作業が簡単なのもコラムロボットの特徴の一つだ。
垂直多関節ロボットは、多数の回転軸の組み合わせで位置や姿勢を決める。「アームが真っすぐ移動する」というシンプルな動作でも、最低2つ以上の回転軸を動かす必要があるという。
また、ロボットを動かす時、構造上どうしても肘が外側にはみ出すことがある。こうした肘のはみ出しなど、ティーチング時には気を配らなければならないポイントが非常に多いため、ロボットのプログラム作成は難しく手間がかかる。
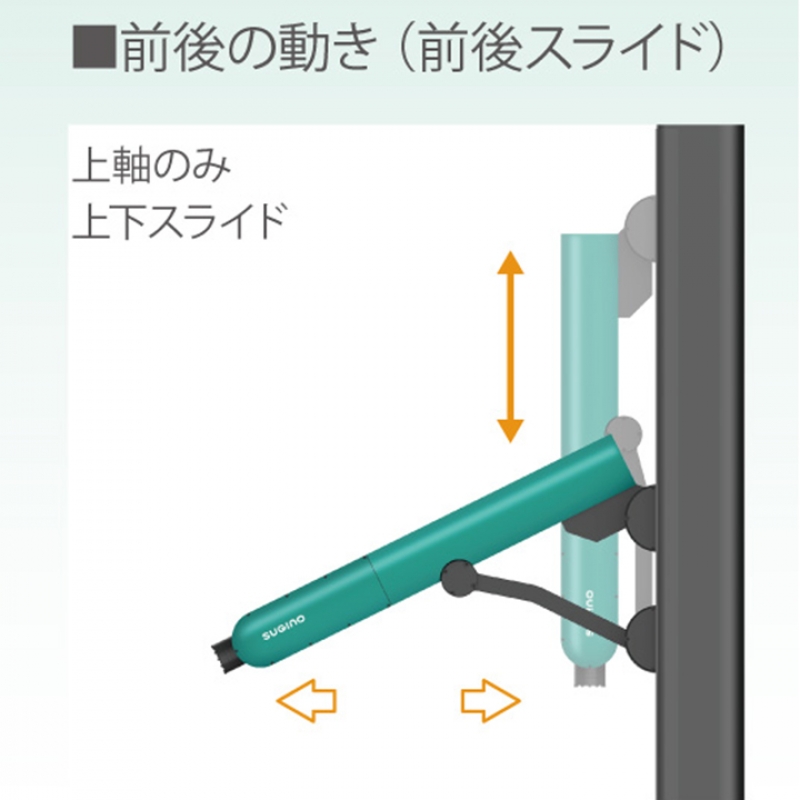
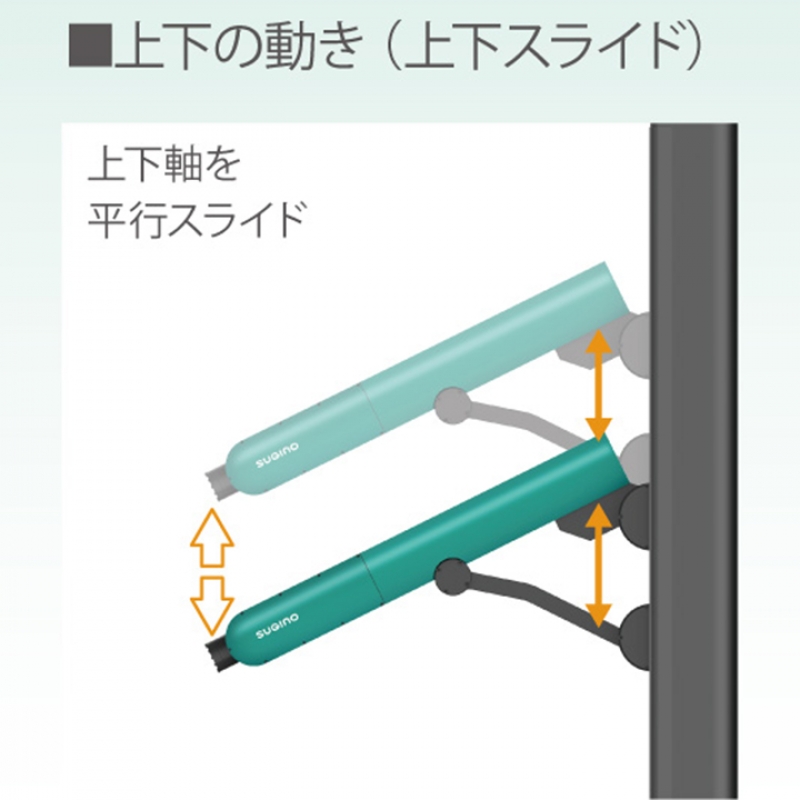
一方、コラムロボットは、ボディー上にある上下2つの軸でアームを動かす。下の写真のように、2つの軸のうち上の軸だけを動かすと下のリンクが前方に倒れ、アームの突き出しの量、つまり前後方向の動きを調整できる。2つの軸を両方とも平行にスライドすれば、リンクの位置を固定したままアームの高さだけを変えられる。
要するに、2つの軸をどう動かすかでアームの大まかな位置関係を決めることができる。
「コラムロボットは直線的な軸の動きの組み合わせが多い。そのため、オペレーターがロボットの動きをイメージしやすく、プログラムを作りやすい」と青木係長は語る。
同じ企業の記事
>>[特別企画 ロボット切削の最前線vol.2]想定以上の引き合い/スギノマシン
>>[特別企画 ロボット切削の最前線 vol.1]大型工作機械を補完する“新たな選択肢”に
>>板金加工の自動化提案を本格化/スギノマシン
>>[活躍するロボジョvol.40]バリ取りの課題をロボットで解決/スギノマシン 荻野みなみさん
>>「自動溶接は難しい」との先入観をくつがえすロボットシステム/スギノマシン
>>板金向けに2種類のパッケージシステムを開発/スギノマシン
>>ロボットでの切削加工を可能にするエンドエフェクターを開発/スギノマシン
>>サービスが競争力の源泉に/スギノマシン
>>ドリリング・タッピングユニットの自動工具交換オプション発売/スギノマシン
>>3Dシミュレーションソフトを発売/スギノマシン
>>自動化コンサルティングサービスを開始/スギノマシン
>>「RI事業部」発足、ロボットを中核にトータル提案/スギノマシン
>>ロボットやAIを活用する新事業部を設立/スギノマシン
>>洗浄や塗膜剝離などの作業負荷を大幅軽減/スギノマシン
>>スイングアーム式ロボットの小型・軽量版を開発/スギノマシン
>>水に強いロボットを開発! 機内設置で自社商品の競争力高める/スギノマシン
>>[注目製品PickUp! vol.9]設置面積は座布団以下!? 500mm四方に収まるコンパクトなロボット【後編】/スギノマシン「スイングアーム式コラムロボット」
>>原発の廃炉作業向けロボットを開発/スギノマシン


この記事を読んだ方へのオススメ記事










産業用ロボットに関する基礎知識 BASIC KNOWLEDGE



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
