[ロボへの道も一歩からCase.1-③]SIer不在で進行中/サンエース編
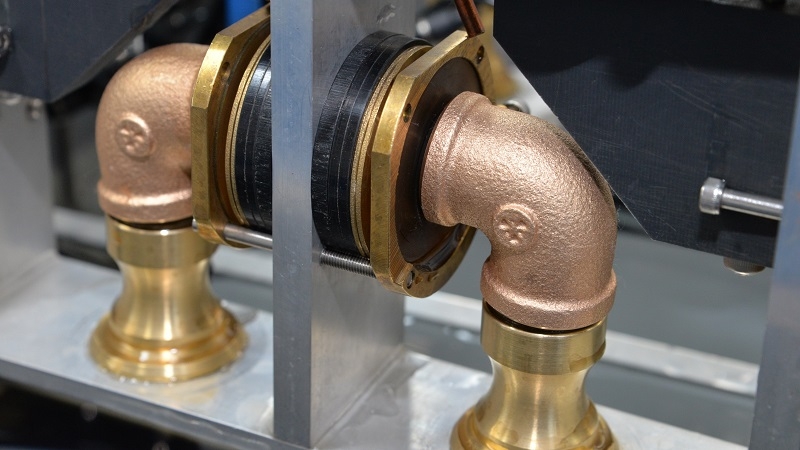
まず斉藤さんを悩ませたのが「どうやってエルボをつかむか」というハンドの部分だった。ストッカーの中は細かく区切られており、1箱に60個のエルボが並ぶ。周りにぶつからず、目的のエルボを正確につかむにはどうすれば良いのか。
外側から挟むべきか、それとも管の内側からつかむべきか、さまざまなシミュレーションを繰り返した。自分でハンドに似せた器具を作成し、実際にエルボを挟みながらイメージを膨らませた。
そして、ハンドが他のエルボに影響せず、多少の位置ずれにも対応できる持ち方に行き着く。
「エルボ管の縁を内側と外側からはさむことにした」(斉藤さん)

すでにハンドメーカーにも目星を付けており、近日中に購入してさらに調整を加えるという。
「なるほど、確かにその持ち方なら大丈夫そうですね!」(記者)
「まぁ、ちゃんとロボットにハンドを取り付けて動かさないと、できるかどうかは分からないですけどね」(斉藤さん)
「そうですね…」(記者)
ロボットにハンドを取り付けて思い通りに動くかを検証し、すり合わせるのが次の段階だ。もちろん、他にも考えなければいけないことが多くあり、それらを検証するにもロボットを決める必要がある。
「いよいよロボットの選定ですか?」(記者)
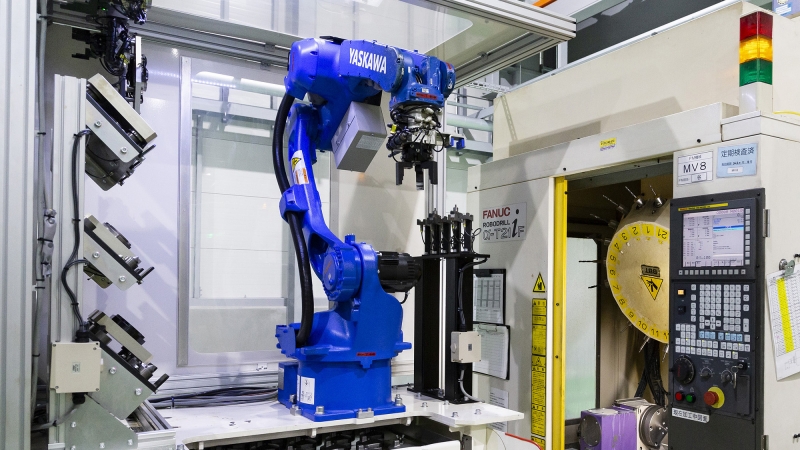
「ロボットはもう決めましたよ」(藤田社長)

「えっ!?いつ決めたんですか?」(記者)「昨日(10月8日)です。契約書にもサインしました」(藤田社長)「どこのロボットに決めたんですか?」(記者)「セイコーエプソンですね」(藤田社長)「…もっと早く教えてくださいよー!」(記者)――次回「ロボ決まる」(ロボットダイジェスト編集部渡部隆寛)本連載でご意見やご質問などがありましたら、ロボットダイジェスト編集部(news-co@news-pub.co.jp)までご連絡ください!16pxポップアップを開くには、Shift+Enterを押してくださいポップアップを開くには、Shift+Enterを押してくださいポップアップを開くには、Shift+Enterを押してくださいポップアップを開くには、Shift+Enterを押してください205ワード
同じ企業の記事
>>[ロボへの道も一歩からCase.1-⑫(最終回)]ロボットのある日常へ/サンエース編
>>[ロボへの道も一歩からCase.1-⑪]ロボが動く時…/サンエース編
>>[ロボへの道も一歩からCase.1-⑩]まずは一通りできるように!/サンエース編
>>[ロボへの道も一歩からCase.1-⑨]作業の選択と集中/サンエース編
>>[ロボへの道も一歩からCase.1-⑧]立ちはだかる干渉の壁/サンエース編
>>[ロボへの道も一歩からCase.1-⑦]ロボ、ついに降臨!/サンエース編
>>[ロボへの道も一歩からCase.1-⑥]ハンドの爪、削ってます/サンエース編
>>[ロボへの道も一歩からCase.1-⑤]どう置くんだ、ストッカー!?/サンエース編
>>[ロボへの道も一歩からCase.1-④]ロボ決まる/サンエース編
>>[ロボへの道も一歩からCase.1-②]ベテラン斉藤さん現わる!/サンエース編
>>[新連載・ロボへの道も一歩からCase.1-①]やっぱりコロナはキツかった/サンエース編


この記事を読んだ方へのオススメ記事







産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年4月号の特集は「重厚長大の時流を読む~変わる市場と生産体制~」です。電子版も販売しております。詳しくは当欄の下部から。
