[気鋭のロボット研究者vol.35]高精度なロボット切削を【前編】/明治大学 田島真吾 専任講師
田島真吾専任講師は、垂直多関節ロボットを用いた切削加工の精度向上に向けた研究に取り組む。工作機械と比べて加工精度が低いなどの課題に対し、ロボットの動作経路をより正確に制御するアルゴリズム(計算法)を構築した。長い距離の切削でも直線的な動作を実現することで、加工精度の向上を図る。
長い距離でも直線動作を
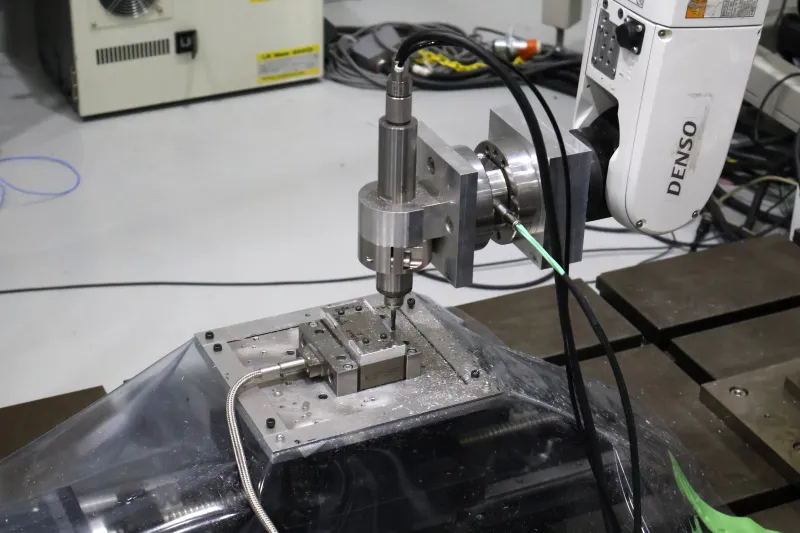
近年、垂直多関節ロボットの活用法として切削加工に注目が集まっている。工作機械と比べ、設置面積や導入時のコストでメリットがある。一方、加工精度や剛性は工作機械より低い。田島講師はロボットの動作経路の制御方法に着目し、加工精度の向上を目指す。
ロボットで作業を自動化するには、動作のティーチング(教示)が必要になる。一般的なティーチングとして、実際にロボットを動かして始点と終点の位置を記録する方法がある。その位置に動くようロボットコントローラーが動作指令を送るが、始点と終点の間の軌跡が直線にならず、切削の仕上がりに影響する。
始点と終点の間に中継地点を複数設定すると動作を精密に設定できるが、ティーチングの時間が増える。そこで田島専任講師は軌跡をより正確に制御するアルゴリズムを新たに構築した。自作のロボットコントローラーで、そのアルゴリズムに基づいた動作指令をロボットに送る。「長い距離の切削で中継地点を設定せずとも、ロボットが直線の動作を実現できる。ティーチングの手間を減らせ、加工精度も上がる」と言う。
以前は5軸加工機の動作制御に関する研究もしており、その考えをロボット切削に応用する。またロボットの剛性に関しては、姿勢の変化を考慮した軌跡生成法を検討するという。「粗加工を中心に、工作機械で加工するにはオーバースペックとなる領域をロボットに置き換えられれば」と話す。
――後編に続く
田島真吾(たじま・しんご)
2009年名古屋大学大学院工学研究科電子情報システム専攻博士前期課程修了、ルネサスデザイン(現ルネサスエレクトロニクス)入社。19年米国オレゴン州立大学でPh.D.修了(ロボット工学、機械工学)。同年、東京工業大学(現東京科学大学)未来産業技術研究所助教。24年から現職。愛知県出身の41歳。


この記事を読んだ方へのオススメ記事







産業用ロボットに関する基礎知識 BASIC KNOWLEDGE



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
