[気鋭のロボット研究者vol.11]普及期の今こそ、ロボットの教示を簡単に【後編】/横浜国立大学 前田雄介准教授
近年、ロボットの性能向上や適用範囲の拡大により、ロボットへの教示(ティーチング)作業を簡単にする技術へと注目が集まる。前田雄介准教授は、ロボットの制御ソフトウエアを軸に、教示を容易にする技術を研究する。直近では、無人搬送車(AGV)や「お掃除ロボット」といった移動式ロボット向けの技術を、固定した産業用ロボットに応用する。
移動ロボの技術で固定型も自律へ
前田雄介准教授は、産業用ロボットが稼働する周辺の環境を、ロボット自身が認識できるようにする研究に取り組む。
ここ2年ほどは、自動運転や自律移動型ロボットなどに使われるSLAM(スラム)技術を、固定して使う産業用ロボットに応用できないか、と模索している。
SLAMは「Simultaneous Localization and Mapping」の頭文字で、意訳すると「環境地図の作成と自己位置の推定を同時にする」こと。カメラや対物センサーなどを駆使して周囲の環境をデータとして取得。地図を作成しながら、ロボット自身の位置を推定する。それらの情報を基に、事前に指定された位置まで自律的に移動するのがスラム技術だ。
近年では、オフィスや商業施設向けの大型ロボット掃除機やAGVなどに取り入れられている。
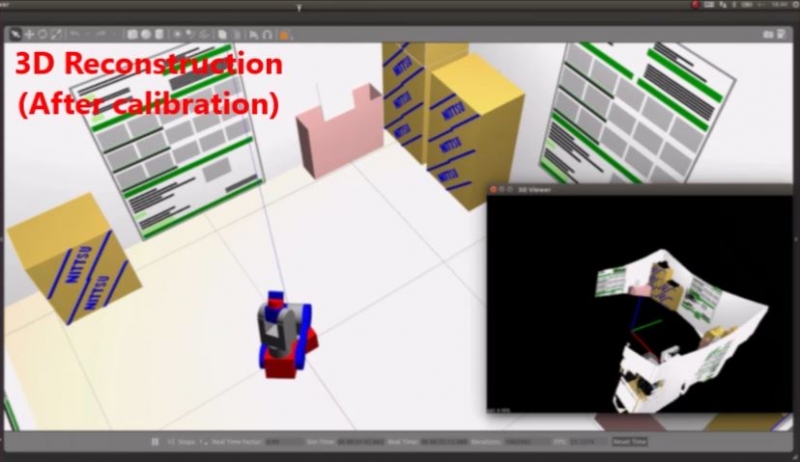
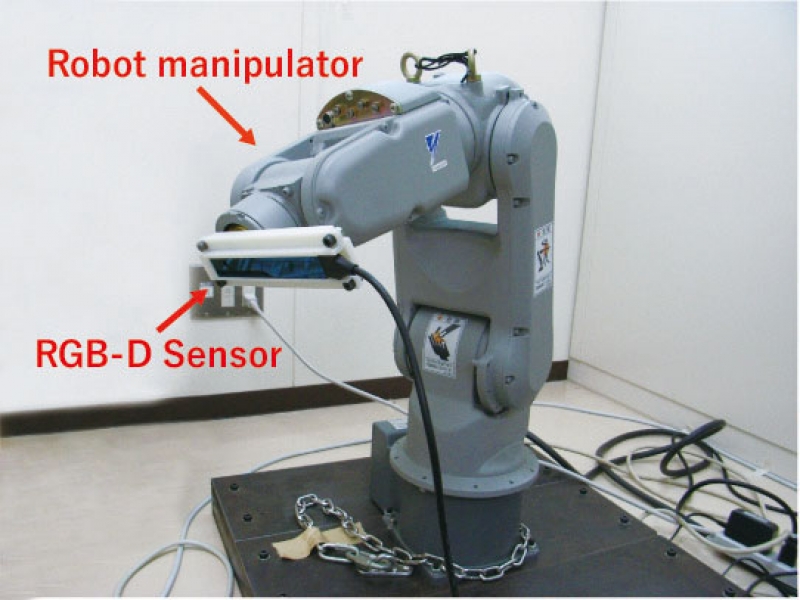
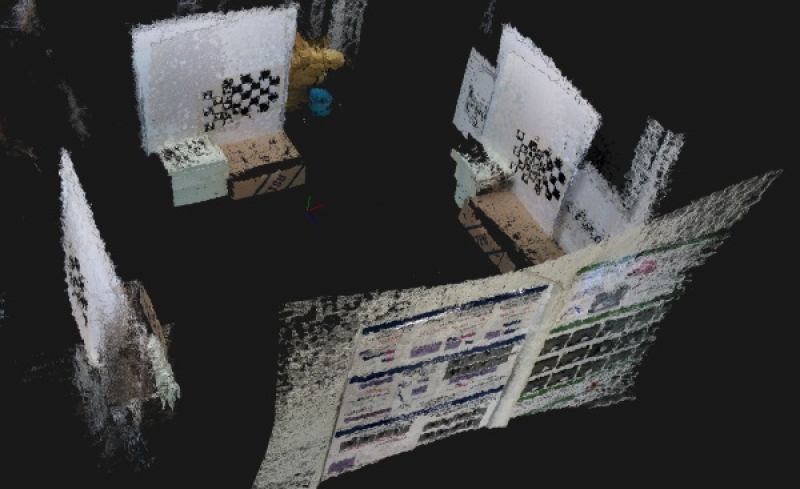
前田准教授は、スラム技術を固定した産業用ロボットに応用した。ロボットの先端に、画像を撮影してその物体までの距離を測れるRGB-Dセンサーを搭載。ロボットを稼働させ、周囲の地図を3次元で作成すると同時に、ロボット自身のアーム位置の誤差などを推定する。
通常だとロボットの設置場所を変えるたびにさまざまな設定変更や調整が必要だが、それらをロボットシステムが自動でできるようになる。
身近なもので課題解決を
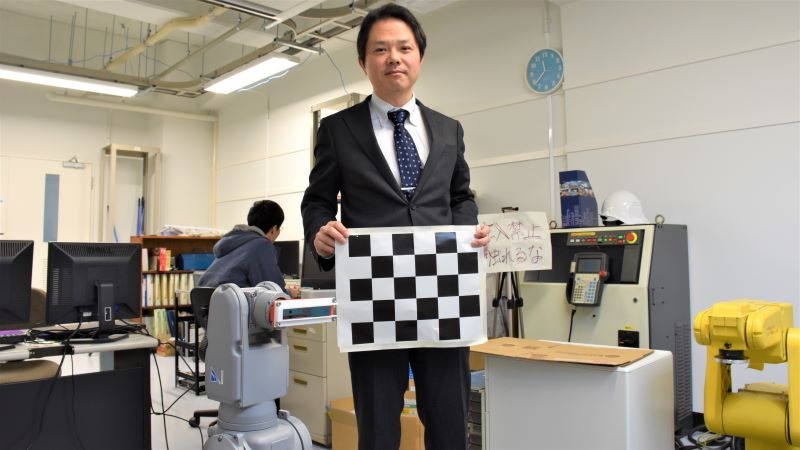
現在の課題は、取得情報の精度向上だ。現状は所得した情報を専用ソフトで整えることで「なんとか使える」レベル。そこで、測定範囲内に目印として白黒のチェッカーボードを張るなど、工夫を重ねる。チェッカーボードがあるとそこが一つの目印になり、認識精度は大きく向上した。
前田准教授は「コストをかけず、身近なもので効果を出せた好例。試せるものは試してみたい」と、さらなる精度向上に取り組む。
――終わり
(ロボットダイジェスト編集部 西塚将喜)

前田雄介(まえだ・ゆうすけ)横浜国立大学大学院工学研究院システムの創生部門准教授1995年3月東京大学工学部卒。99年4月東京大学大学院工学系研究科精密機械工学専攻助手。2004年4月横浜国立大学大学院工学研究院システムの創生部門講師。07年4月より現職。ロボットが高機能になればなるほど、人が補うべき余地も増えると、ロボットに親心を持ちながら接する。愛知県出身の47歳。


この記事を読んだ方へのオススメ記事









産業用ロボットに関する基礎知識 BASIC KNOWLEDGE


ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年5月号の特集は「AIブームが広げる市場~成長領域のニーズに応えよ~」です。電子版も販売しております。詳しくは当欄の下部から。
