[気鋭のロボット研究者vol.11]普及期の今こそ、ロボットの教示を簡単に【前編】/横浜国立大学 前田雄介准教授
近年、ロボットの性能向上が目覚ましい。それに伴い、ロボットに動作を教える教示作業も難しくなる。またロボットの適用範囲の拡大により、現場の担当者がロボットを教示できない事例も増えている。そんな時代にこそ、「ロボットの教示作業を簡単にする技術が必要」と前田雄介准教授は研究に取り組む。
ロボットが自律的に経路を生成
前田雄介准教授は「自動経路生成」で教示作業を簡単にする。自動経路生成は、昨年末の2019国際ロボット展でも話題になった技術の1つだ。
例えば、ロボットがA地点に置いた物をB地点に運ぶ。自動経路生成技術を使えば、作業者はA地点とB地点を教えるだけで、ロボットの制御システムがパターン化した動作手順やプログラム、人工知能(AI)を駆使し、自律的に経路を生成する。
自動で経路を生成するためには、事前にロボットシステムが、周辺環境を把握していなければならない。A地点とB地点の間に障害物がある場合に把握していないと、ロボットが障害物に衝突してしまう。ロボットアームの可動範囲と周辺環境を加味した判断が、システムには求められる。
ロボットを直接動かし、周辺環境を教える

そこで前田雄介准教授は、ロボットシステムが周辺環境を把握する際に役立つ技術の研究に取り組む。
1つは、ロボットが動いていい範囲を手動で教える方法だ。作業者が直接ロボットをつかんで動かし、動作できる範囲を教える。するとロボットシステムはその範囲内で、経路を自動生成する。ロボットアームを手で動かして動作範囲を教えるので、障害物がある箇所は物理的に動作可能な範囲として指定できない。
ARで指定範囲を分かりやすく
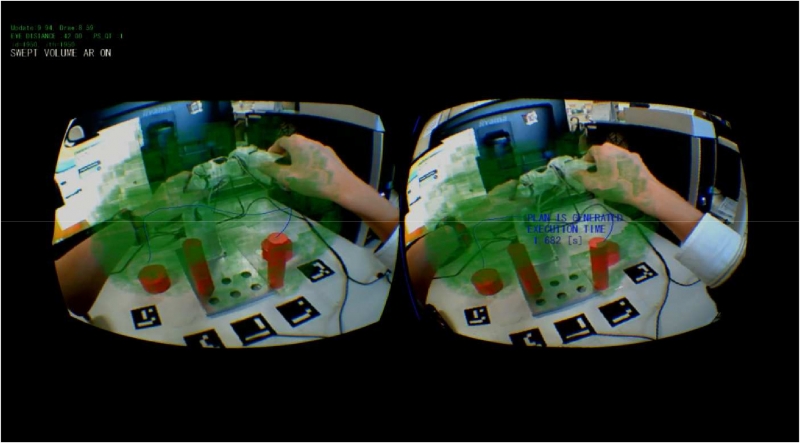
最近は拡張現実(AR)技術を使い、指定範囲を直感的にわかりやすくした。頭に装着するゴーグル型のヘッド・マウント・ディスプレーで、目の前の映像に重ねながら指定範囲を確認できる。ゴーグル型装置のカメラで撮影した映像上に、指定した範囲を色付けして再現する。
前田准教授は「実際のロボットに重ねて指定範囲を確認できると、範囲の指定し忘れを防げる。より広い範囲を指定できると、より効率の良い経路を生成できる」と効果を話す。
――後編につづく
(ロボットダイジェスト編集部 西塚将喜)
前田雄介(まえだ・ゆうすけ)
横浜国立大学 大学院工学研究院 システムの創生部門 准教授
1995年3月東京大学工学部卒。97年3月同大学工学系研究科精密機械工学専攻修士課程修了。一般企業勤務を経て99年4月東京大学大学院工学系研究科精密機械工学専攻助手。2004年4月横浜国立大学大学院工学研究院システムの創生部門講師。07年4月より現職。愛知県出身の47歳。休日は家族サービスに充てるなど、子煩悩な一面も。


この記事を読んだ方へのオススメ記事






産業用ロボットに関する基礎知識 BASIC KNOWLEDGE


ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年5月号の特集は「AIブームが広げる市場~成長領域のニーズに応えよ~」です。電子版も販売しております。詳しくは当欄の下部から。
