協働ロボットの新たな設計手法を提案/豆蔵、日本電産シンポ、三井化学

ITコンサルティング会社の豆蔵(東京都新宿区、中原徹也社長)は1月12日、「軽さ」と「柔らかさ」を実現する協働ロボットの設計手法を開発したと発表した。
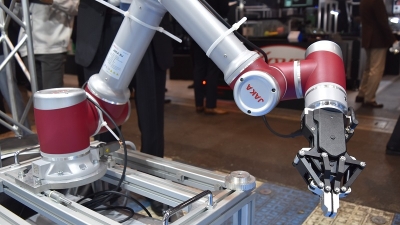
この設計手法は、2020年4月から実施する日本電産シンポ(京都府長岡京市、西本達也社長)、三井化学との共同研究の成果だ。同手法で設計した協働ロボットの試作機を、東京都江東区の東京ビッグサイトで1月20日~22日に開催される「第5回ロボデックス」で披露する。
同研究では、3社それぞれの技術を持ち寄った。「軽さ」の面では、三井化学が樹脂部品の設計や成形技術を提供することにより、フレームの大部分に樹脂素材を使用。同形状の金属製のものに比べて、重量を最大で2分の1にできる。
「柔らかさ」には豆蔵と日本電産シンポの技術を活用する。従来、ロボットアームを柔らかく動作させるためには、関節部分に回転の強さを計測するトルクセンサーを使用することが多かった。しかし、同研究では豆蔵の力制御アルゴリズム(計算方法)や、日本電産シンポの特殊な減速機を使用することで、トルクセンサーなしで柔らかな制御ができる。トルクセンサーを使用しないことで、センサーの故障や誤作動の抑止、関節部分の軽量化ができる。
この共同研究の成果を新たな協働ロボットの設計手法として、今後ロボットメーカーへ提案していく。


この記事を読んだ方へのオススメ記事









産業用ロボットに関する基礎知識 BASIC KNOWLEDGE

月刊生産財マーケティング
MAGAZINE
ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
